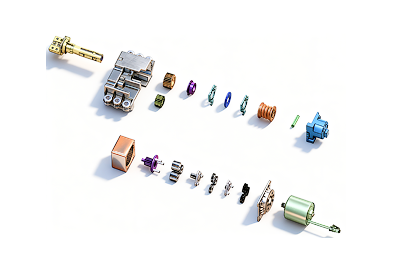
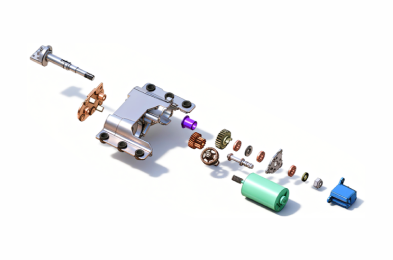
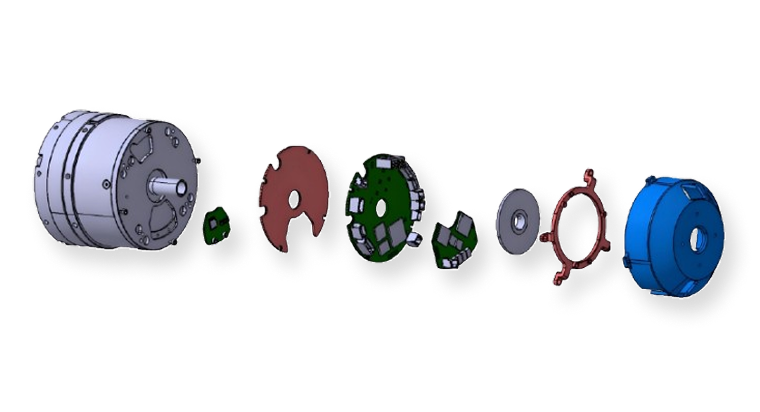
01 驱动与关节一体化 围绕电机驱动器与关节模组集成设计,持续打磨服务机器人执行机构的控制、调试与可靠性闭环。 Details 围绕电机驱动器与关节模组集成设计,持续打磨服务机器人执行机构的控制、调试与可靠性闭环。
04 多模态感知预研 面向复杂场景推进多模态感知硬件融合与人机交互状态识别,为下一阶段机器人平台打基础。 Details 面向复杂场景推进多模态感知硬件融合与人机交互状态识别,为下一阶段机器人平台打基础。
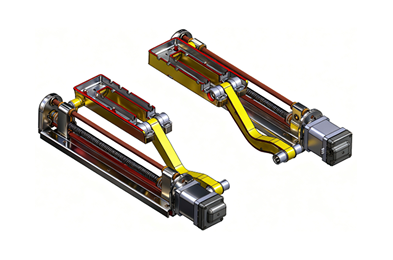
06 场景化服务终端 围绕出行陪伴机器人与服务终端平台建设可扩展硬件接口,为更多商业化场景预留能力边界。 Details 围绕出行陪伴机器人与服务终端平台建设可扩展硬件接口,为更多商业化场景预留能力边界。